
修机|移动式装车机悬臂胶带驱动机构存在问题及改进方法
2023-11-08 10:13:17
1. 装车机简介
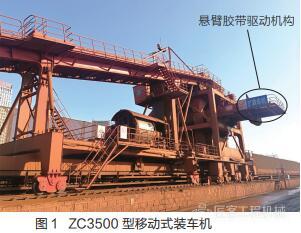
移动式装车机(以下简称装车机)是一种在港口铁路专用轨道上运行的大型装卸设备,可沿轨道行走或移动,其臂架具有伸缩功能,能够连续不断地将堆场上的矿石等散货装入火车货箱内,并可同时为 2 列平行停放的火车进行装车作业,因此其装卸作业效率很高。我们日照港矿石堆场目前共有 4 台 ZC3500 型装车机,其外形如图 1 所示。
2. 存在问题
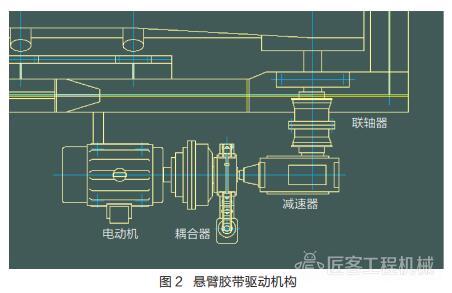
ZC3500 型装车机悬臂胶带驱动机构由Y250M-4 型 电 动 机、YOX Ⅱ Z-450 型 液 力耦 合 器、MC3RLSF0325 型 减 速 器、GICLII YA100×212 型联轴器组成,如图 2 所示。其动力传输路线如下:电动机通过液力耦合器驱动减速器运转,减速器通过联轴器驱动悬臂胶带滚筒转动,由悬臂胶带滚筒带动悬臂胶带运行,从而实现矿石散货装卸作业。
堆场设备经过长期使用,其装车机轨道发生沉降,造成装车机整机行走过程中产生较大振动,导致悬臂胶带驱动机构主要部件的同轴度经常产生较大偏差,运行一段时间后就需要进行调整。但是调整该同轴度时,遇到以下 3个问题:一是由于装车机悬臂胶带驱动机构安装在装车机悬臂大梁的外侧面,其电动机、减速器无法采用吊车或手拉葫芦辅助调整,只能通过人工方式采用撬棍进行调整;二是装车机悬臂胶带驱动机构各部件连接同轴度精度要求较高(轴向及径向误差不大于 0.10mm),达不到同轴度精度要求会造成装车机驱动机构运行不稳定;三是每次调整同轴度所需时间较长(约为 8h),严重影响装卸进度和效率。
3. 改进方法
由于装车机悬臂胶带驱动机构存在以上问题,我们决定对其进行技术改进,经过深入调研,制定并实施了 4 项具体改进方法,如下所述。
一是将原有的电动机平台和减速器平台合二为一,从平台基础上保证电动机与减速器的同轴度。改进后的悬臂胶带驱动平台总成如图 3 所示。

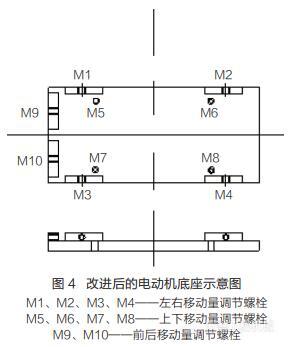
二是将原有电动机底座上下、左右、前后6 个自由度方向加装顶丝,使电动机 6 个自由度方向均可使用顶丝进行精细调整,避免在调整电动机同轴度过程中,由于电动机质量过大,采用撬棍撬动方法进行调整。改进后的电动机底座如图 4 所示。
三是在减速器底座左、右侧各加装 1 个夹块,将夹块与减速器安装座孔用螺栓固定好,直接放置在驱动平台上,通过敲击移动两侧夹块的方式,将减速器快速定位。
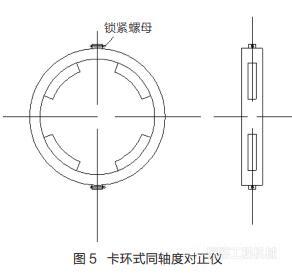
四是优化同轴度调整工艺,即使用卡环式同轴度对正仪与百分表配合,以胶带滚筒为基准向电动机一侧进行同轴度调整。卡环式同轴度对正仪由 2 只半圆形卡环组成,如图 5 所示。这 2 只半圆形卡环及内环挡圈由车床一次加工成型,以保证内环挡圈与外圈端面的垂直度。车削完成后,由直线切割机分割为对称的 2 个半形卡环。卡环外圈端面尺寸由液力耦合器输出轴至制动环的间距决定,具体尺寸需实际测量;卡环外径以实际测量的制动环外径为准。
4. 同轴度调整方法
悬臂胶带驱动机构各组件的同轴度调整方法如下:首先,将卡环式同轴度对正仪卡在液力耦合器输出轴的外端面,用刀口尺沿轴向紧靠制动环,上、下移动量调节螺栓观察制动环与卡环式同轴度对正仪之间的间隙;然后,根据该间隙,调整电动机底座上相关调整螺栓;最后,使用百分表检测调整悬臂胶带驱动机构各组件的同轴度精度,若不合格,通过左右移动量调节螺栓M1、M2、M3、M4,上下移动量调节螺栓 M5、M6、M7、M8, 前、 后 移 动 量 调 节 螺 栓 M9、M10 再次进行微调,即可完成调整工作。
5. 改进效果
对装车机悬臂胶带驱动机构实施上述改进后,调整其同轴度所需时间由原来的 8h 缩短为3h,大幅度压缩了调整时间,提高了调整效率,提高了装车机的利用率,消除了装车机胶带驱动机构运行过程存在的安全隐患。
作者:田鑫 鲁伟 徐振奇 李磊
来源:《工程机械与维修》2018年第二期

 京公网安备 11011502006194号
京公网安备 11011502006194号